guest@j.hunt:/# ls
mp3
honda
ant
wifi
orpp
chevette
turret
motion
exdos
bot
code
dvd
mac
firebird
plane
truck
sonarbot
camlab
shop
lab
mig
scanner
tank
yamaha
seca
mapbot
ncp-003
ncp-005
DOM
tl1000s
yoctos
armboard
trip2007
trip2008
trip2009
steam
ebike
microbot
zipitbot
router
hhills
mccct
dubai
ecar
hberg
hhills2
speed
octobot
roboscope
xbot
dockbot
3dprint
dyno
tank2
quad
rover
mazebot
guest@j.hunt:/#./microbot
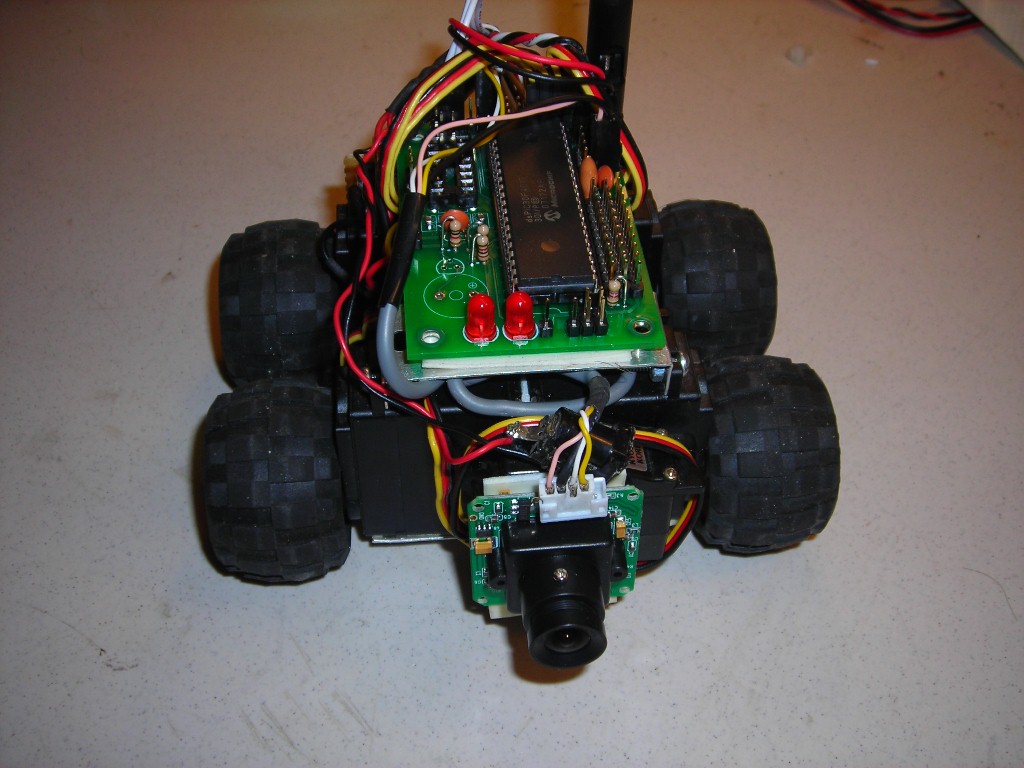
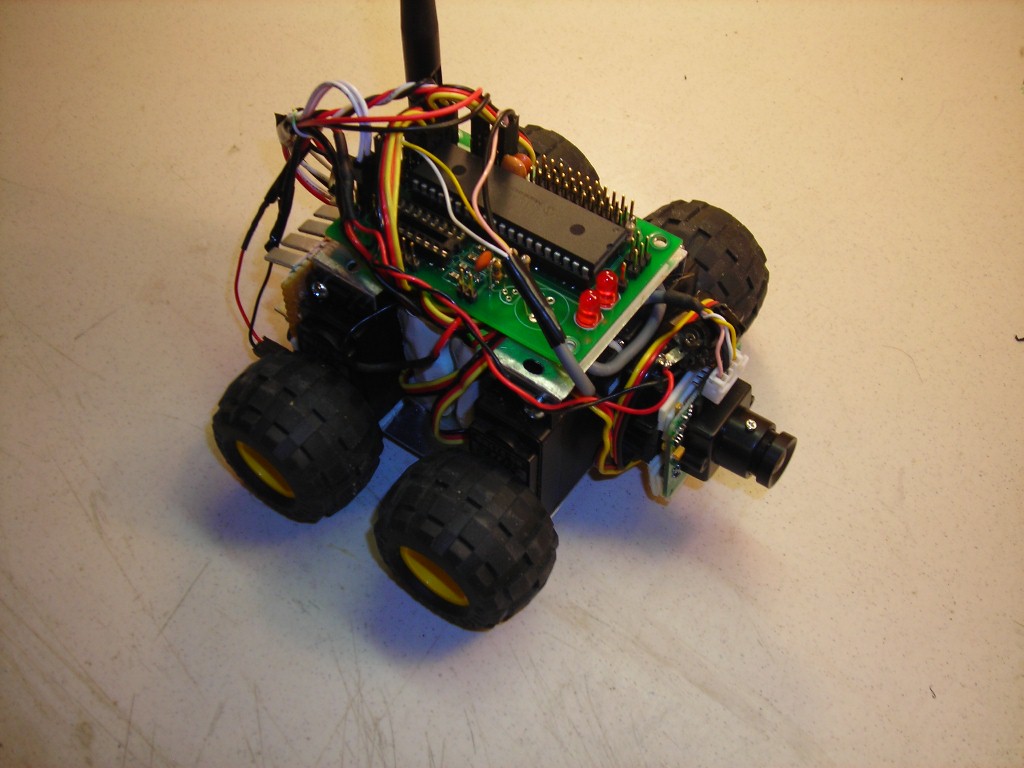
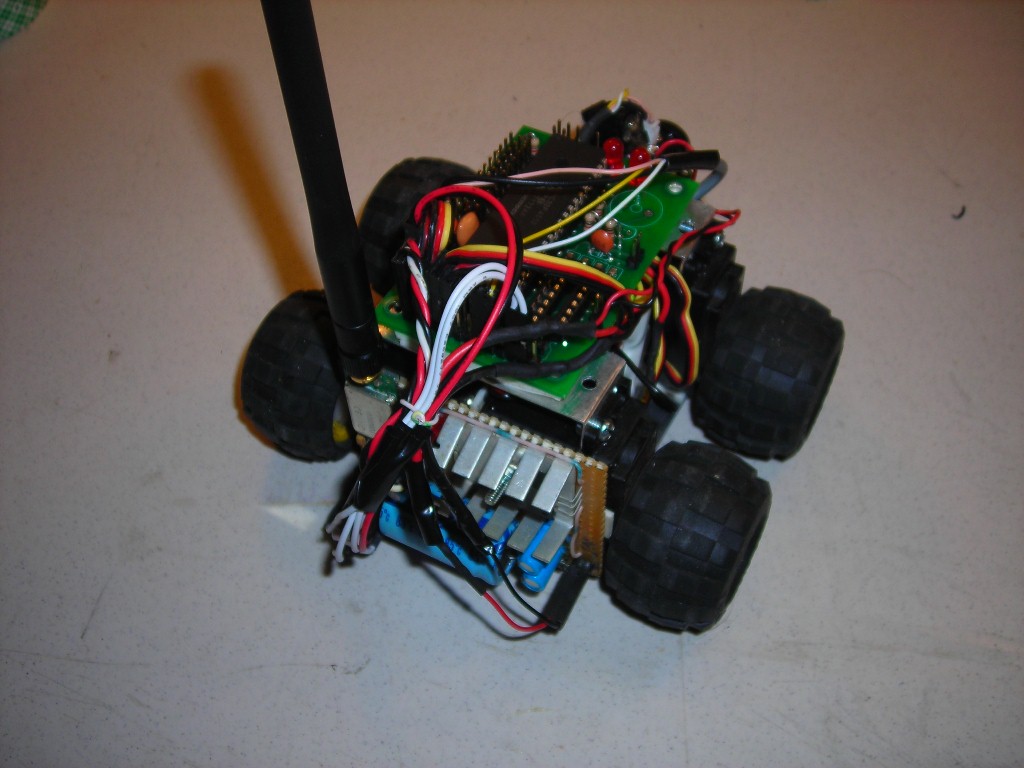
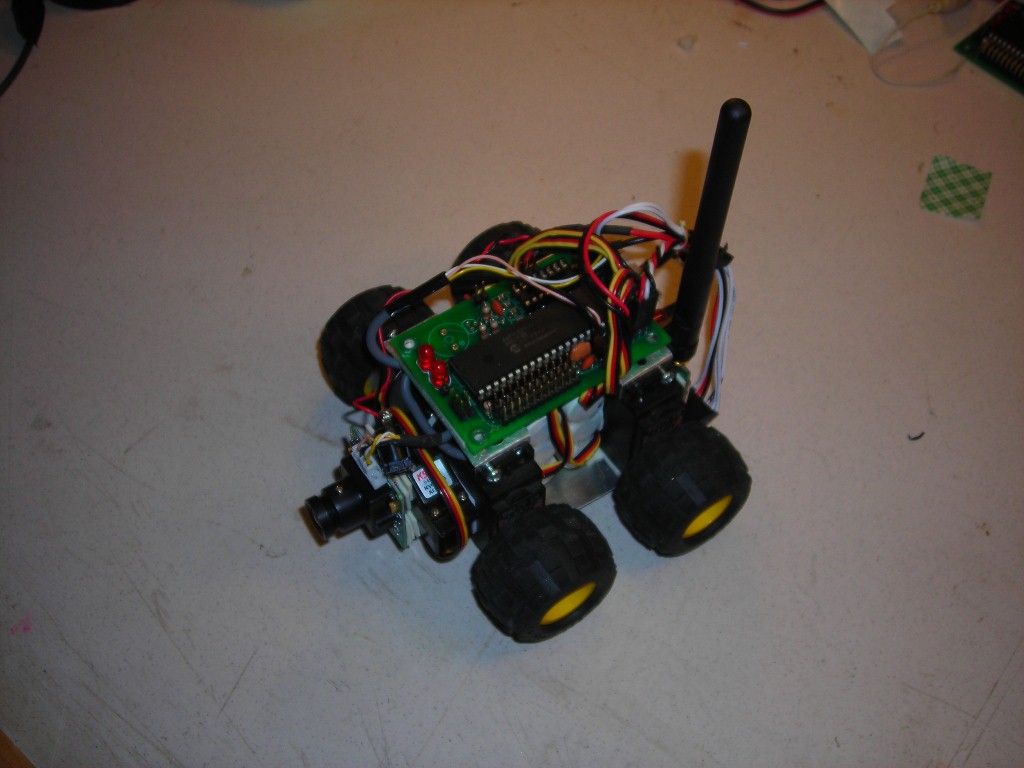
Microbot
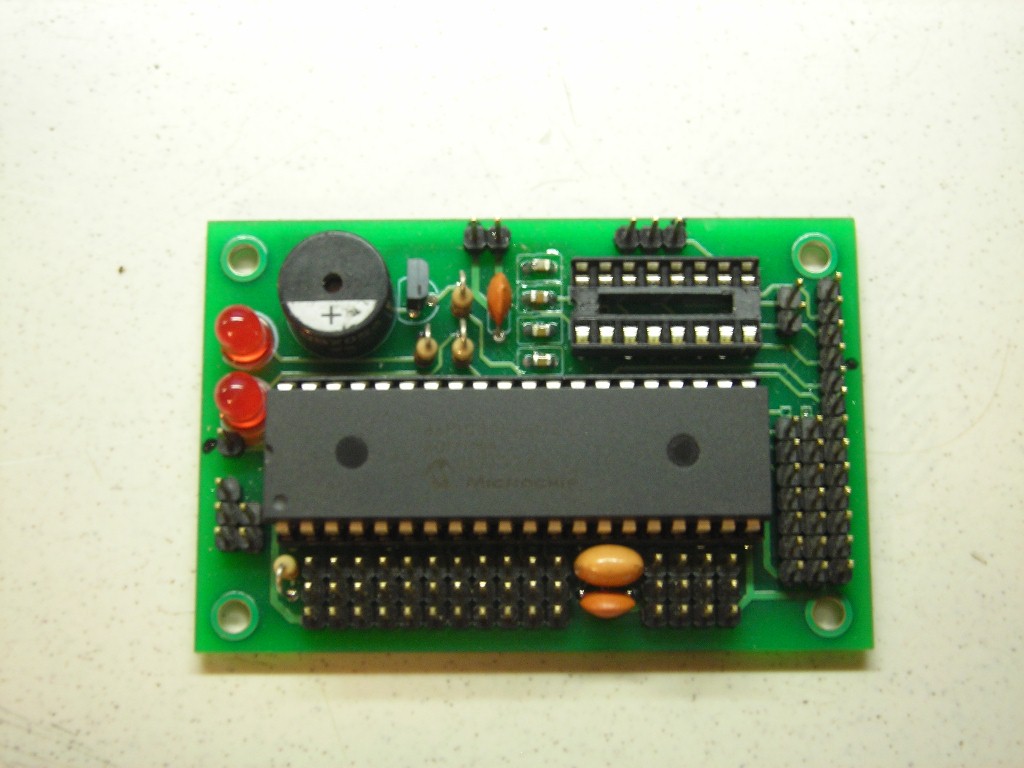
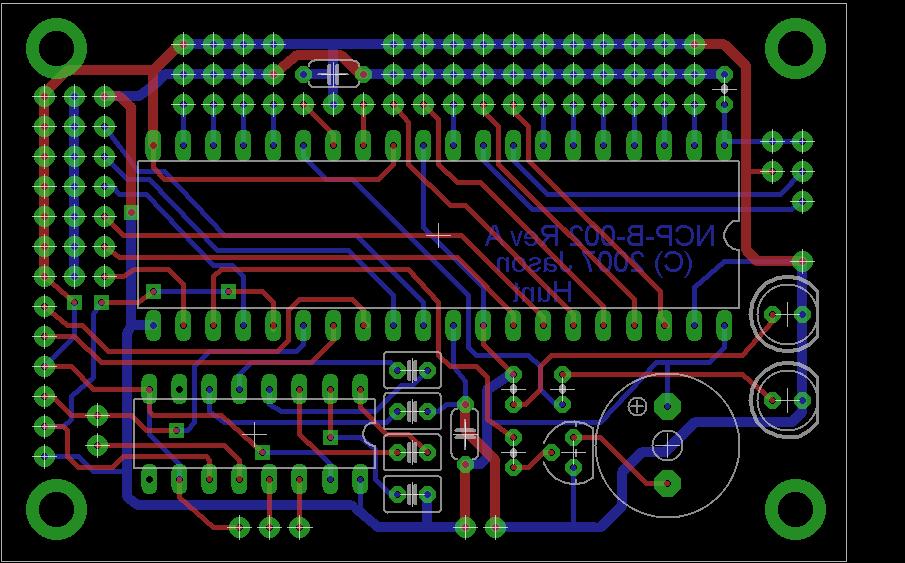
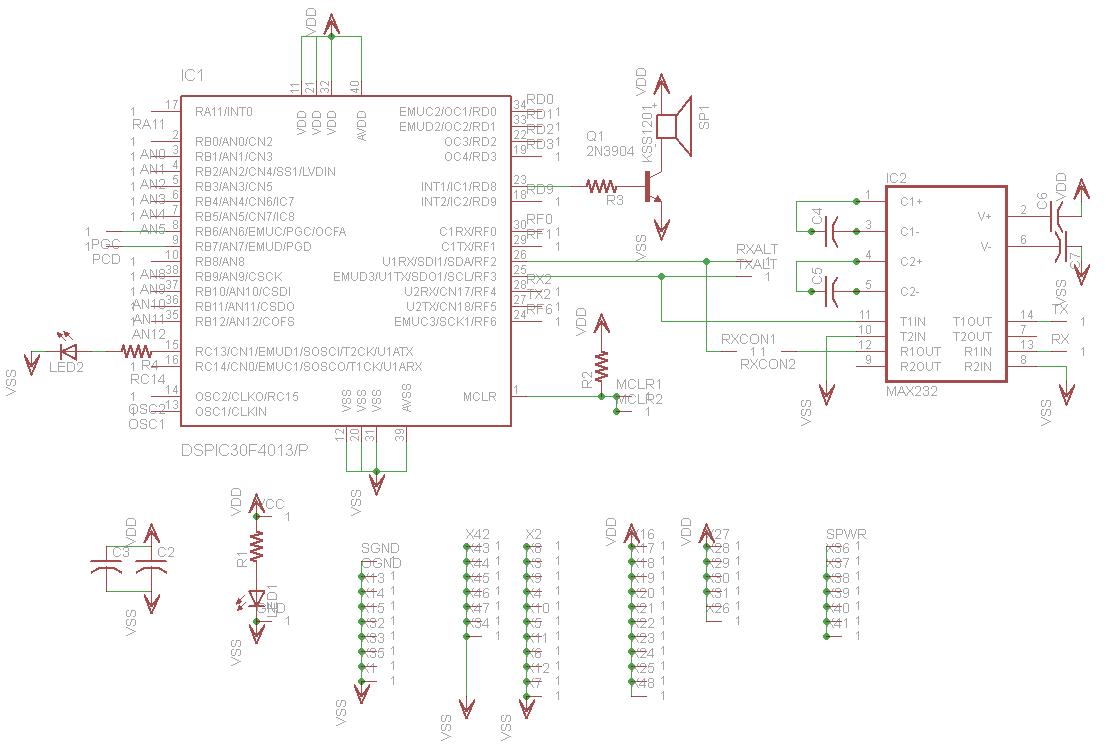
The goal here was to make a small, inexpensive robot with the
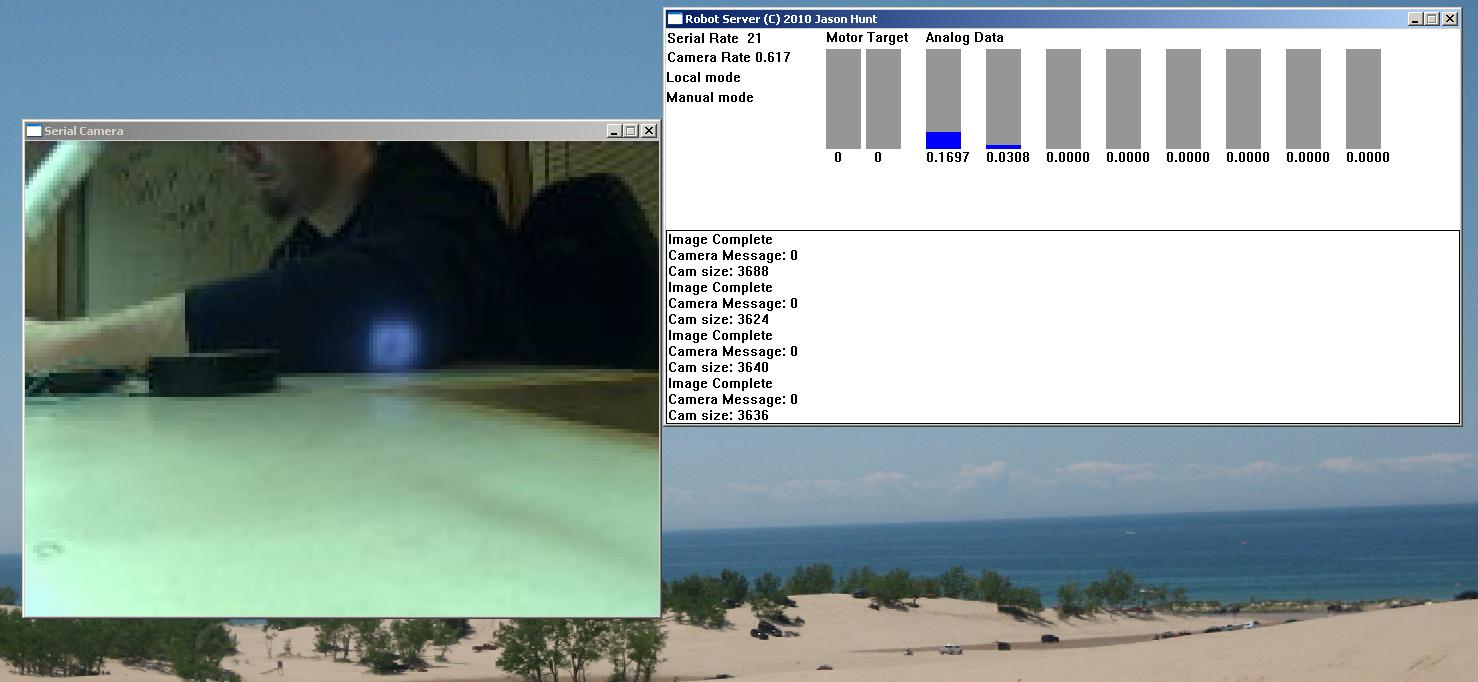
minimum of fabrication. The robot is controlled over a bluetooth link. The controller board
multiplexes the camera with the telemetry and control signals. Both the control data and telemetry are updated at 10hz. Camera: LinkSprite Bluetooth Module: BlueSmirf - 250k baud uplink Motion: 4x Hobby servos Controller board: Custom, based on a dsPIC Power Supply: 7805 Based Other than that, it is made from scrap aluminum and double-sided tape. Source Code



Contact: nulluser || gmail || com