guest@j.hunt:/# ls
mp3
honda
ant
wifi
orpp
chevette
turret
motion
exdos
bot
code
dvd
mac
firebird
plane
truck
sonarbot
camlab
shop
lab
mig
scanner
tank
yamaha
seca
mapbot
ncp-003
ncp-005
DOM
tl1000s
yoctos
armboard
trip2007
trip2008
trip2009
steam
ebike
microbot
zipitbot
router
hhills
mccct
dubai
ecar
hberg
hhills2
speed
octobot
roboscope
xbot
dockbot
3dprint
dyno
tank2
quad
rover
mazebot
guest@j.hunt:/#./zipitbot
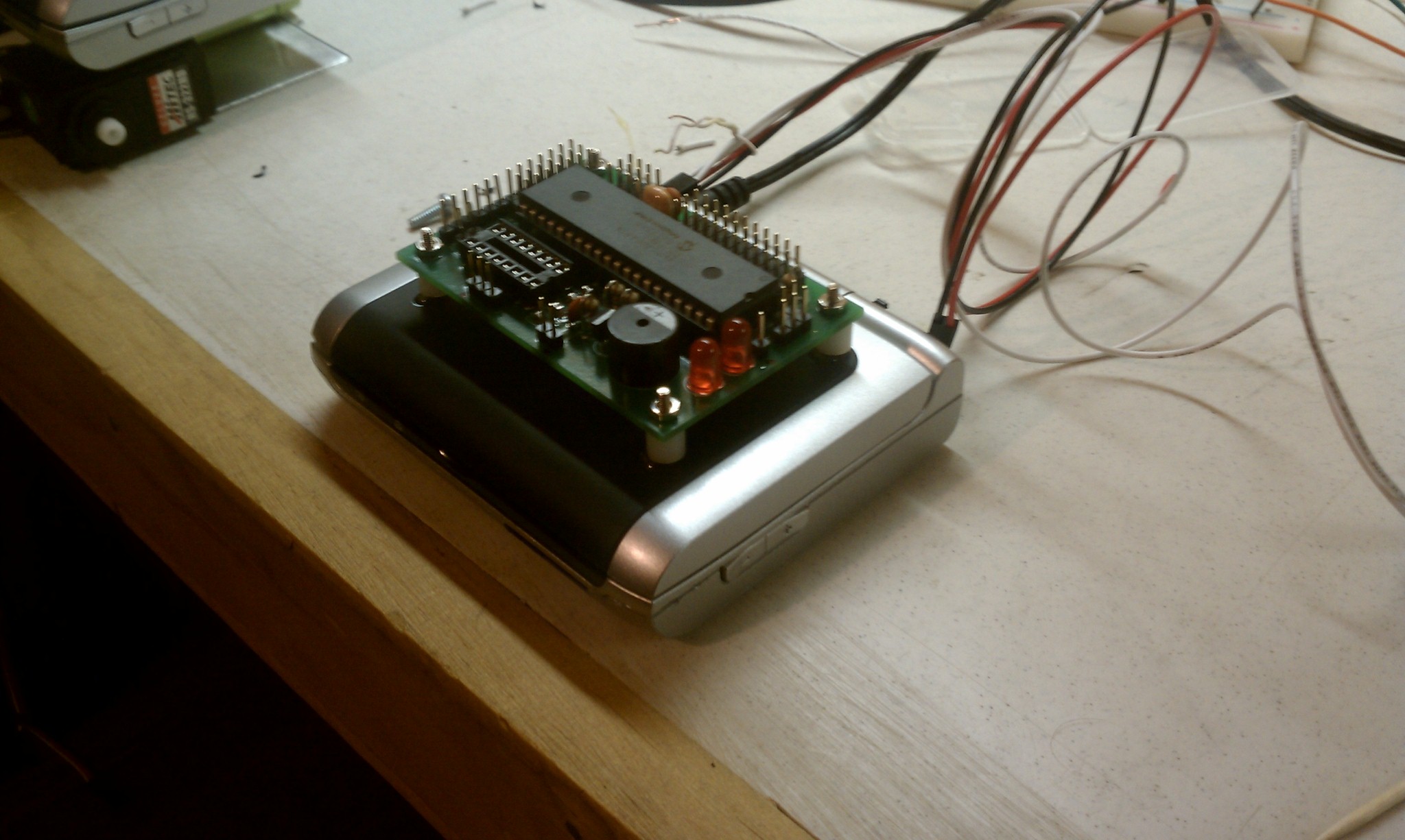
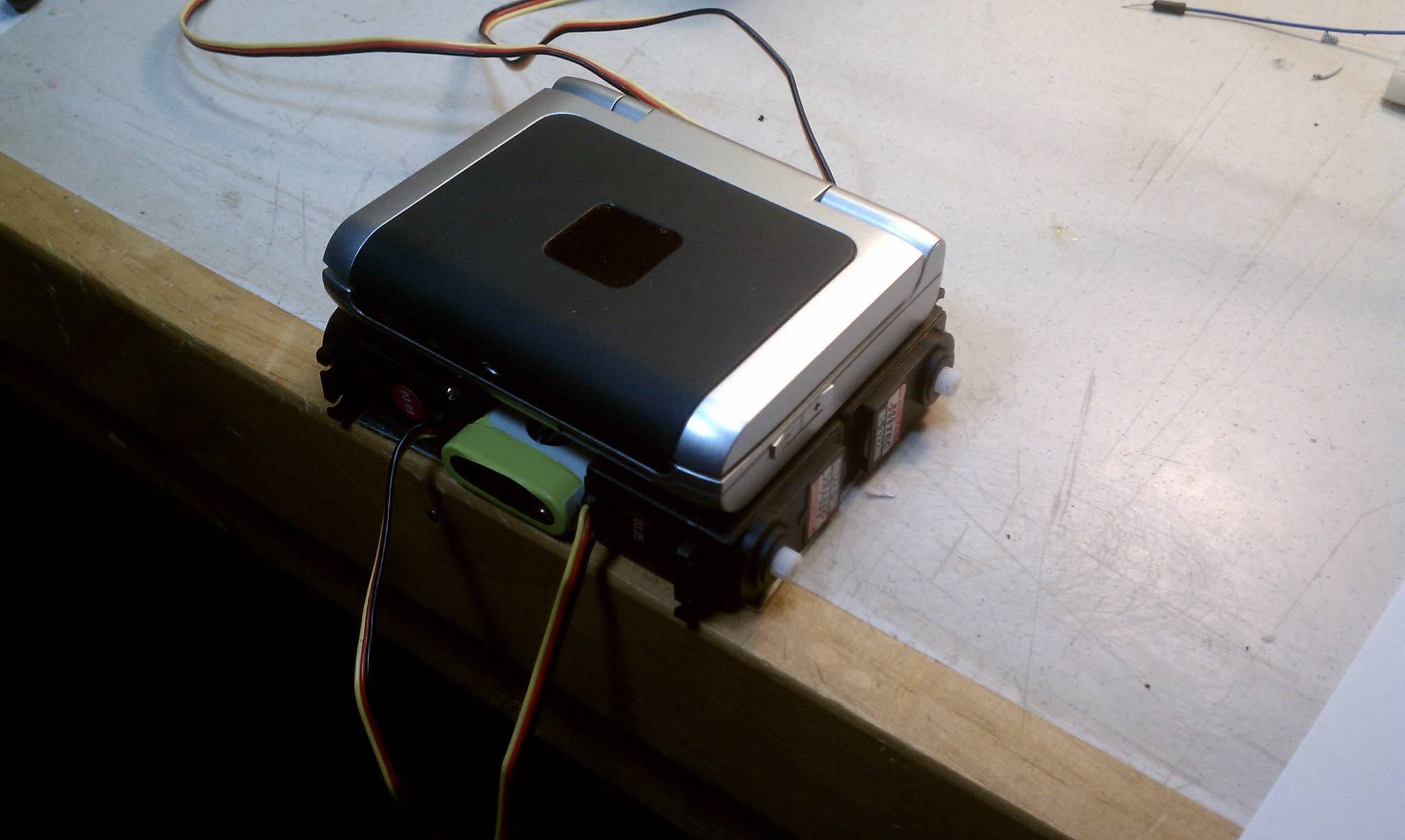
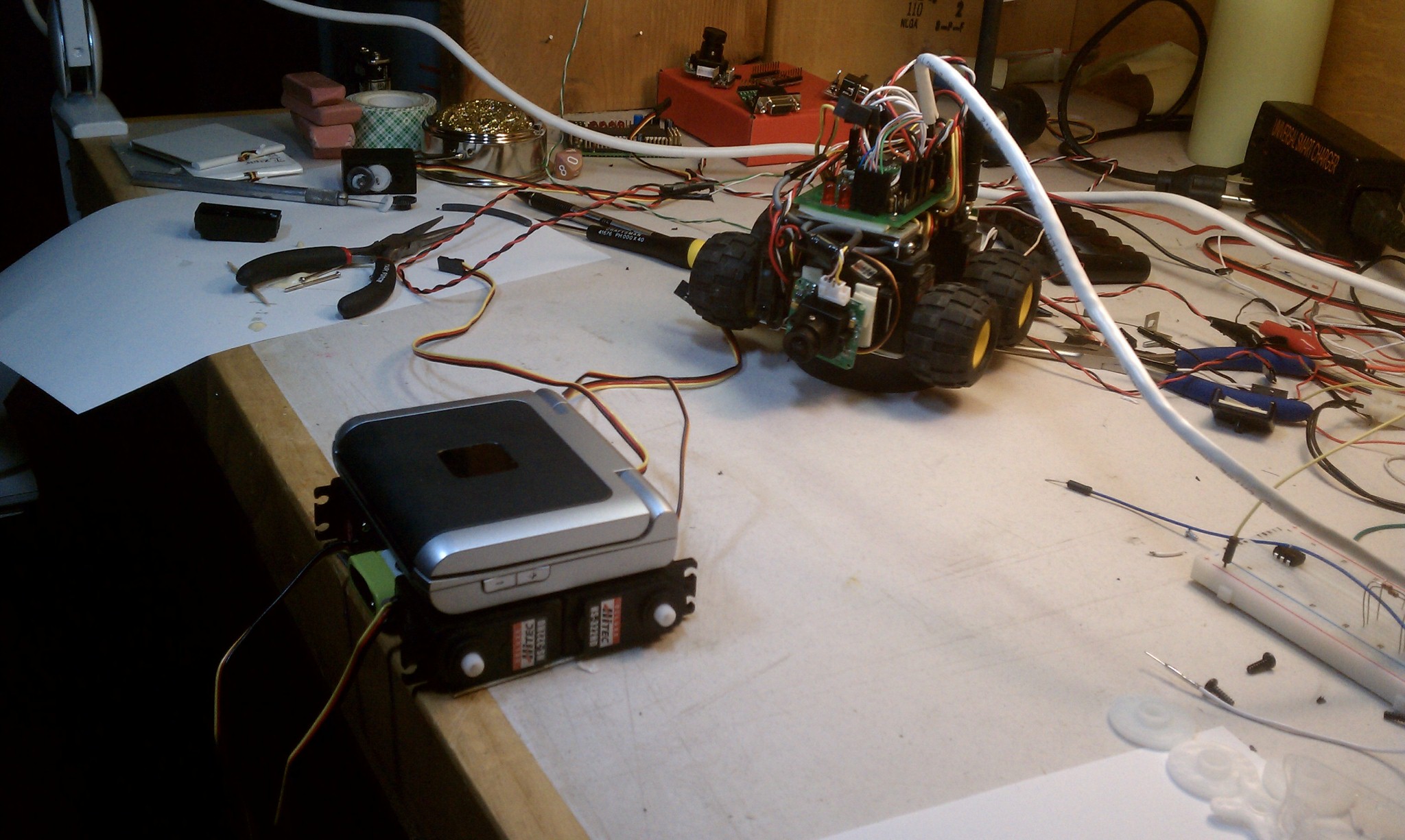
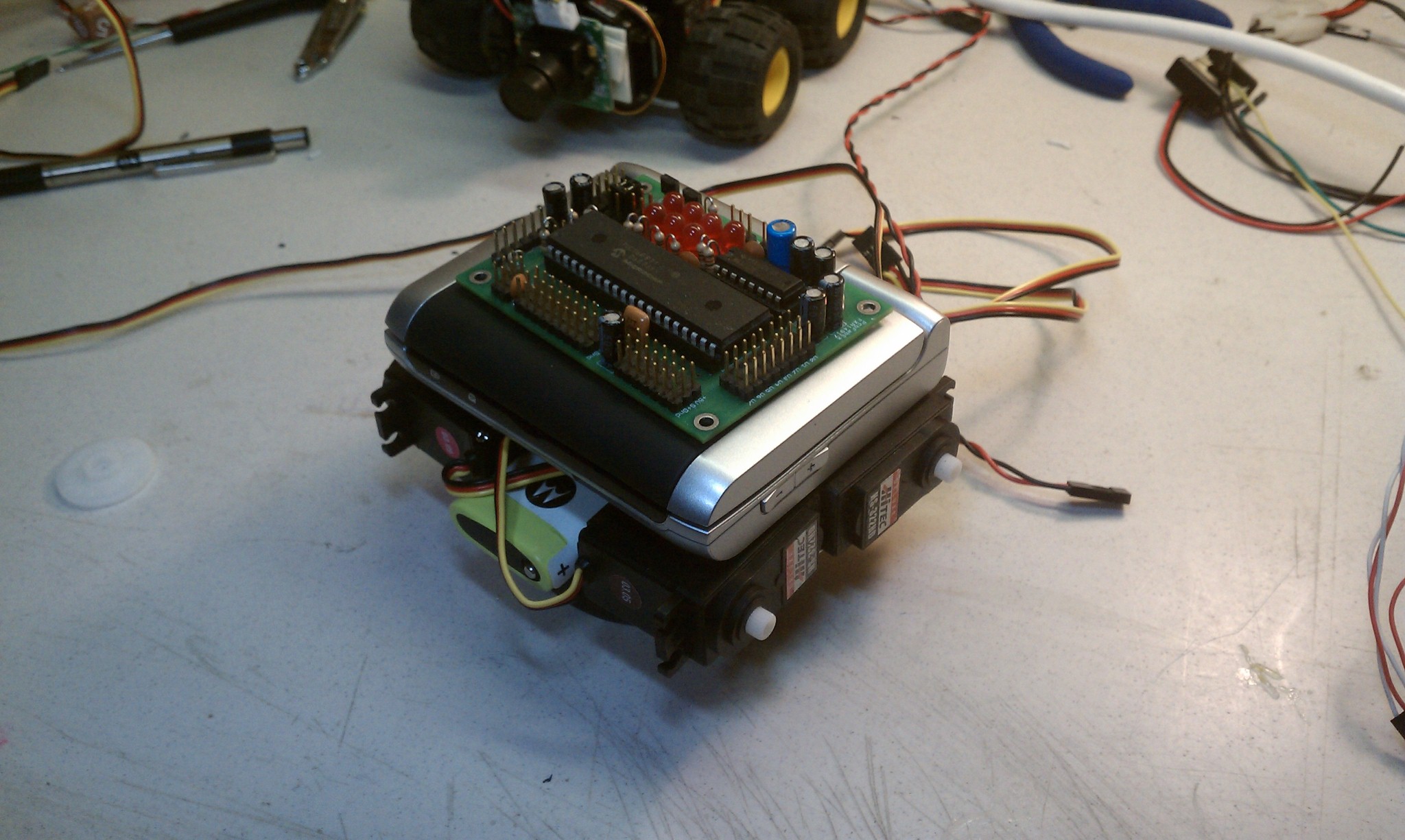
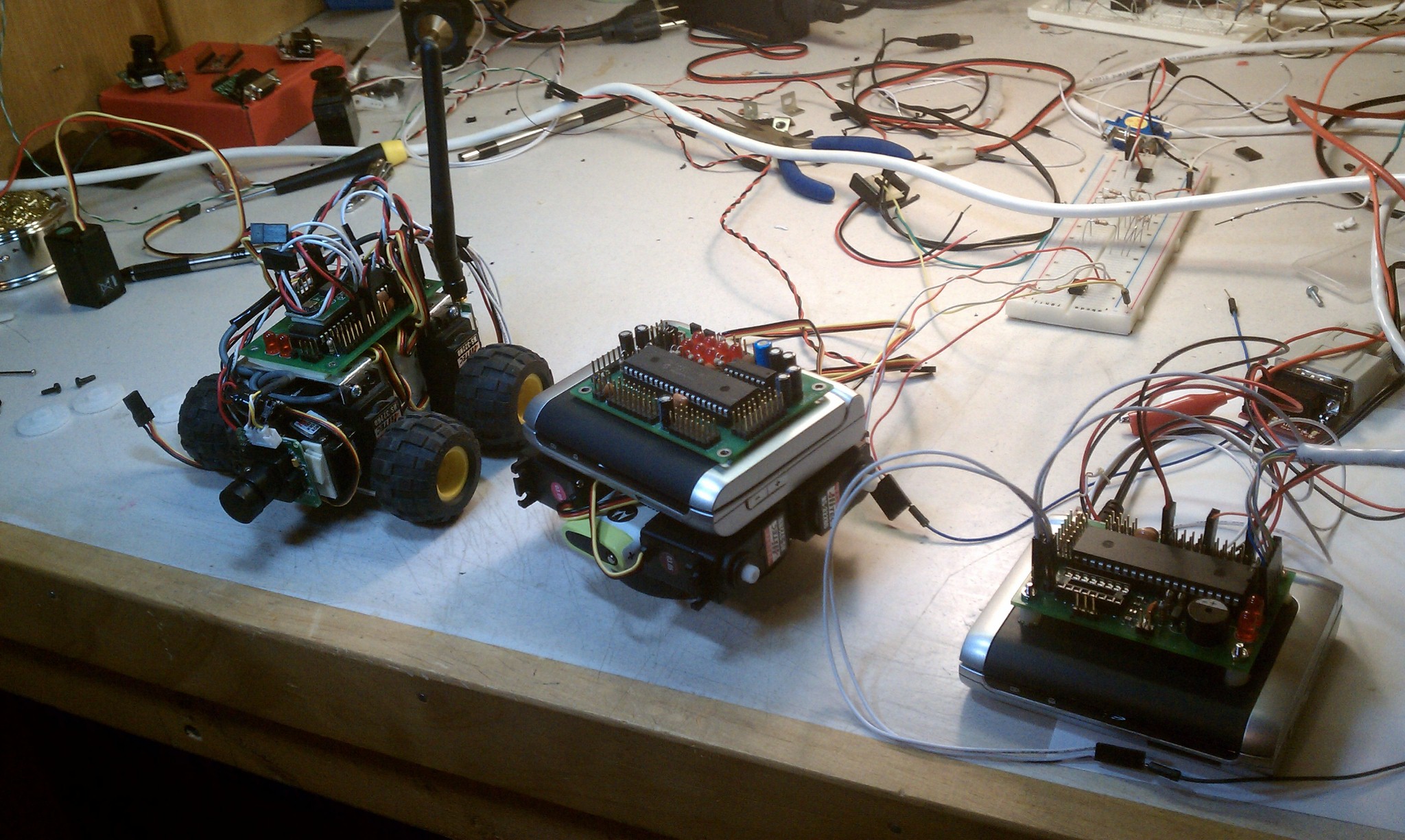
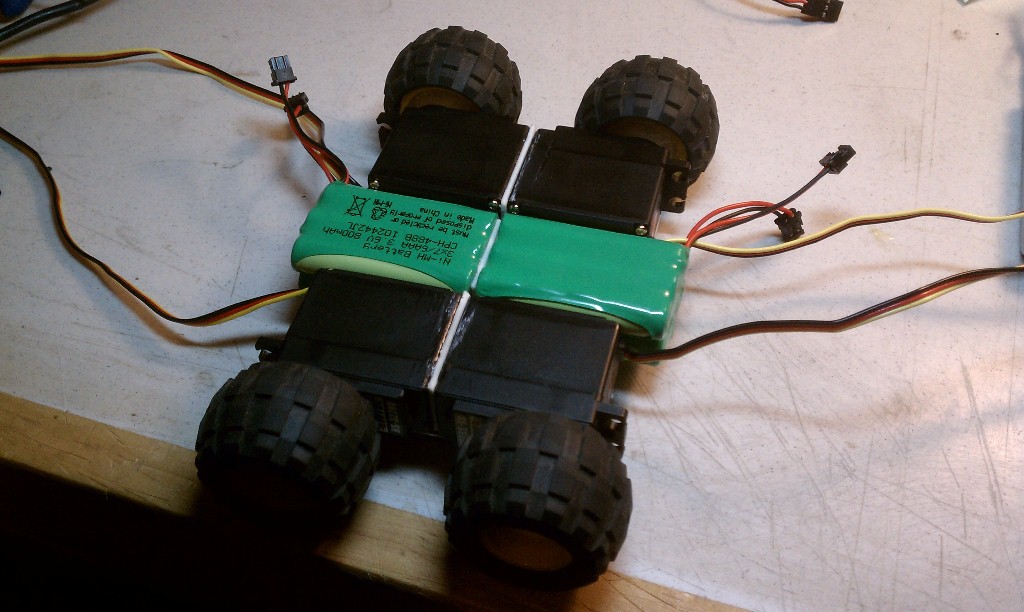
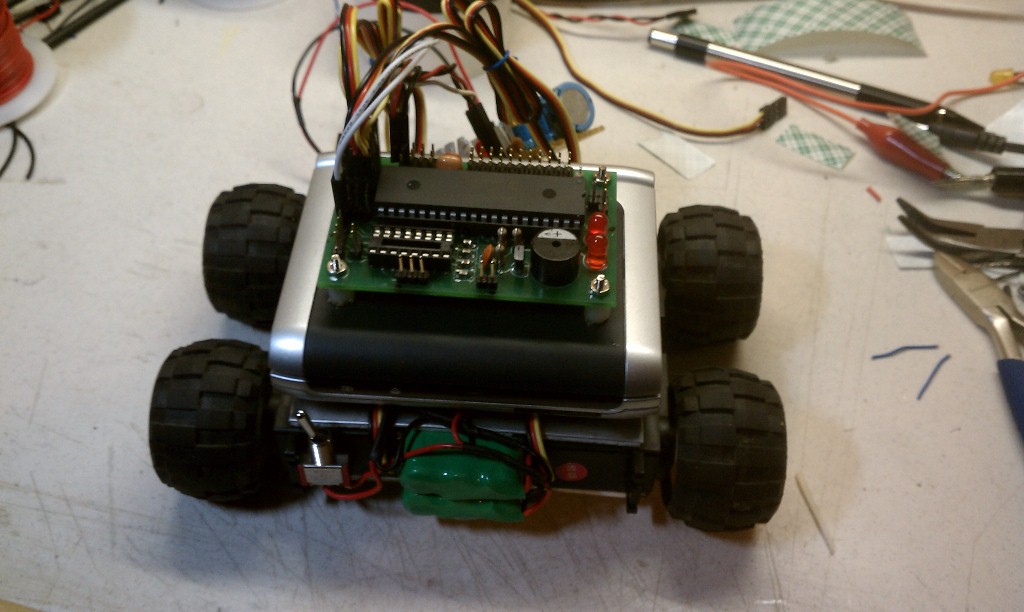
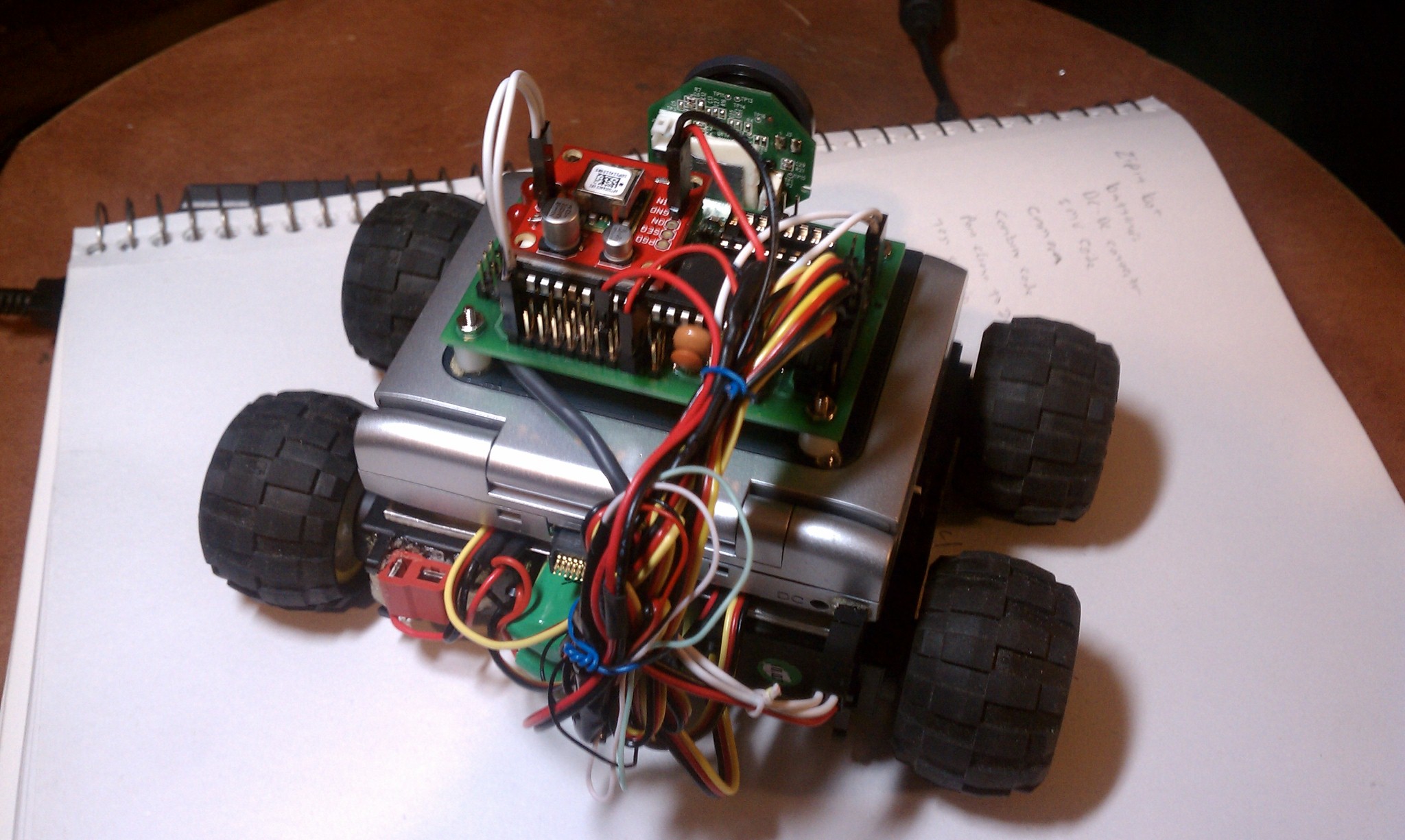
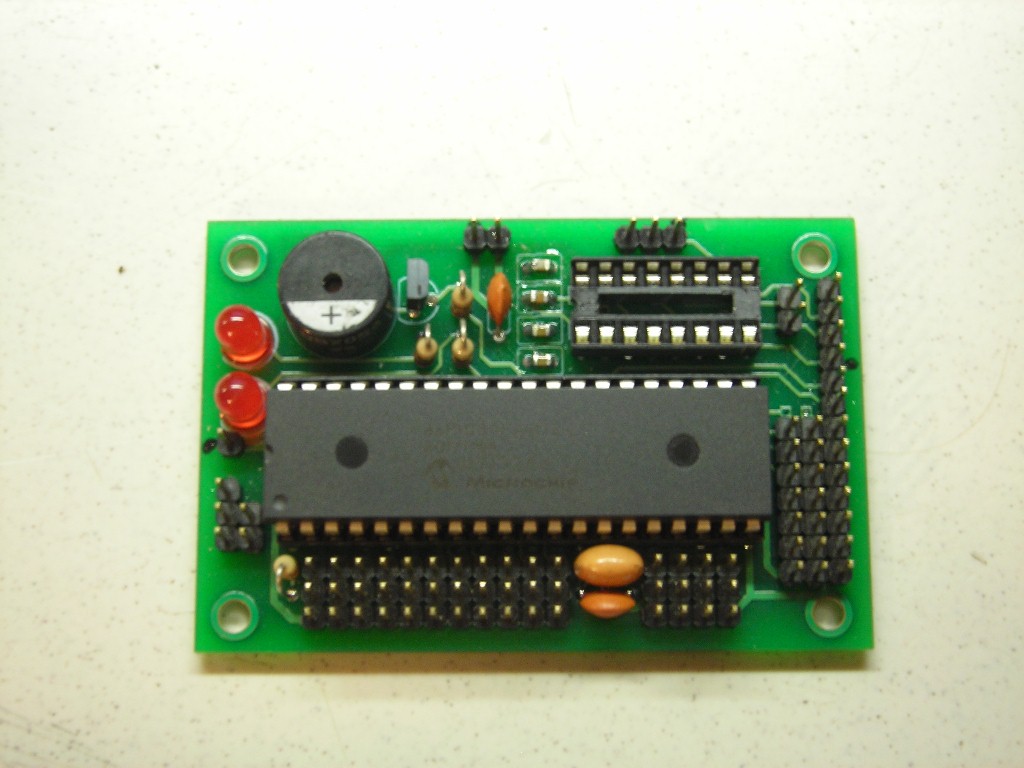
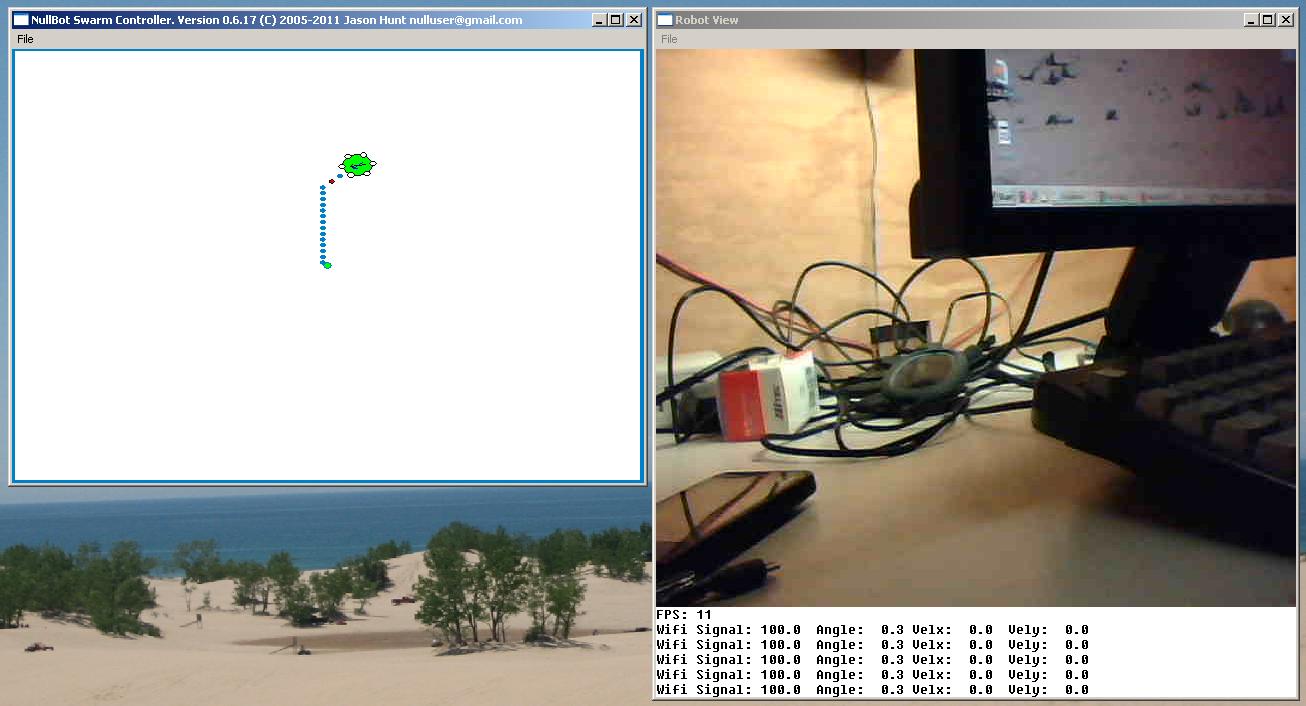
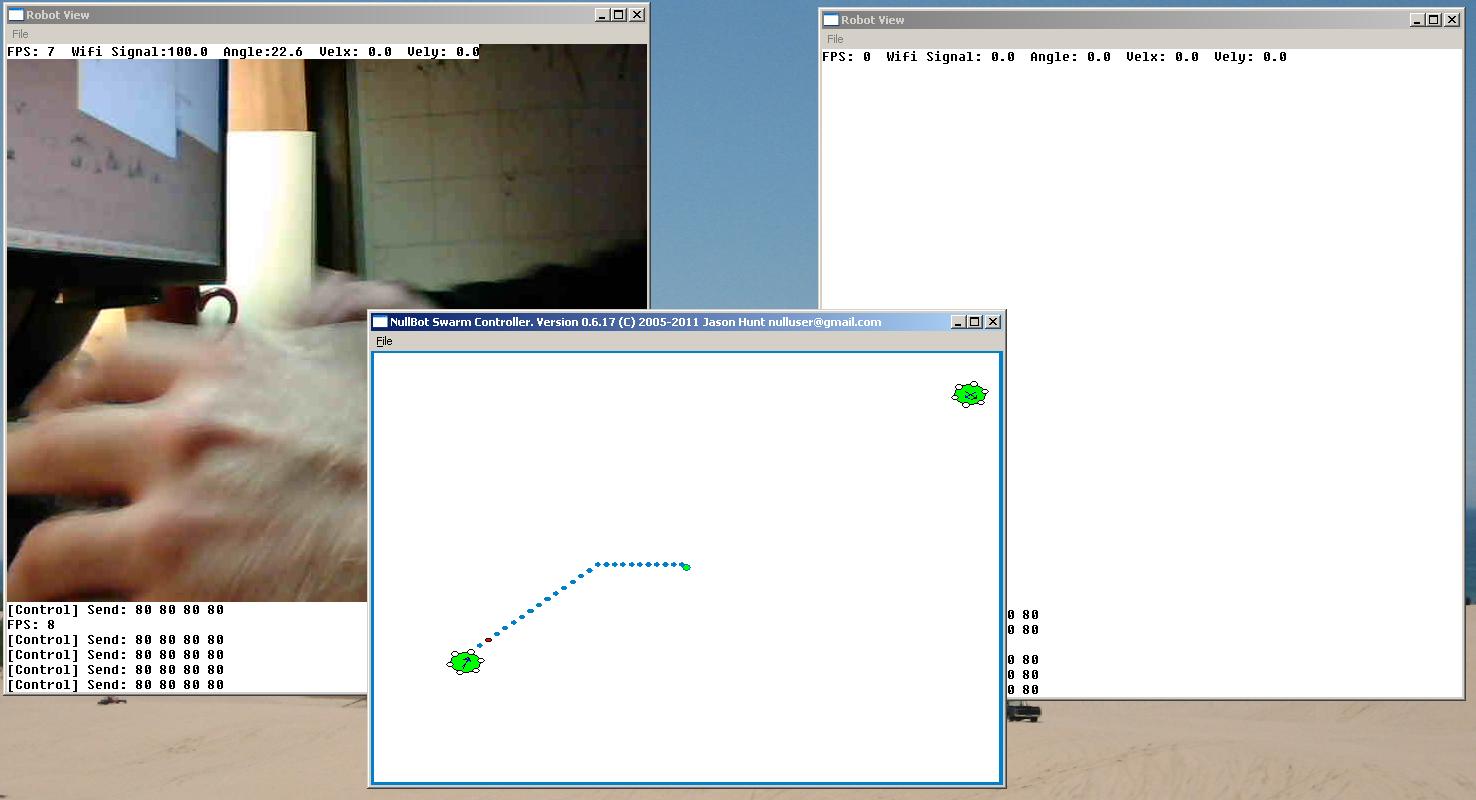
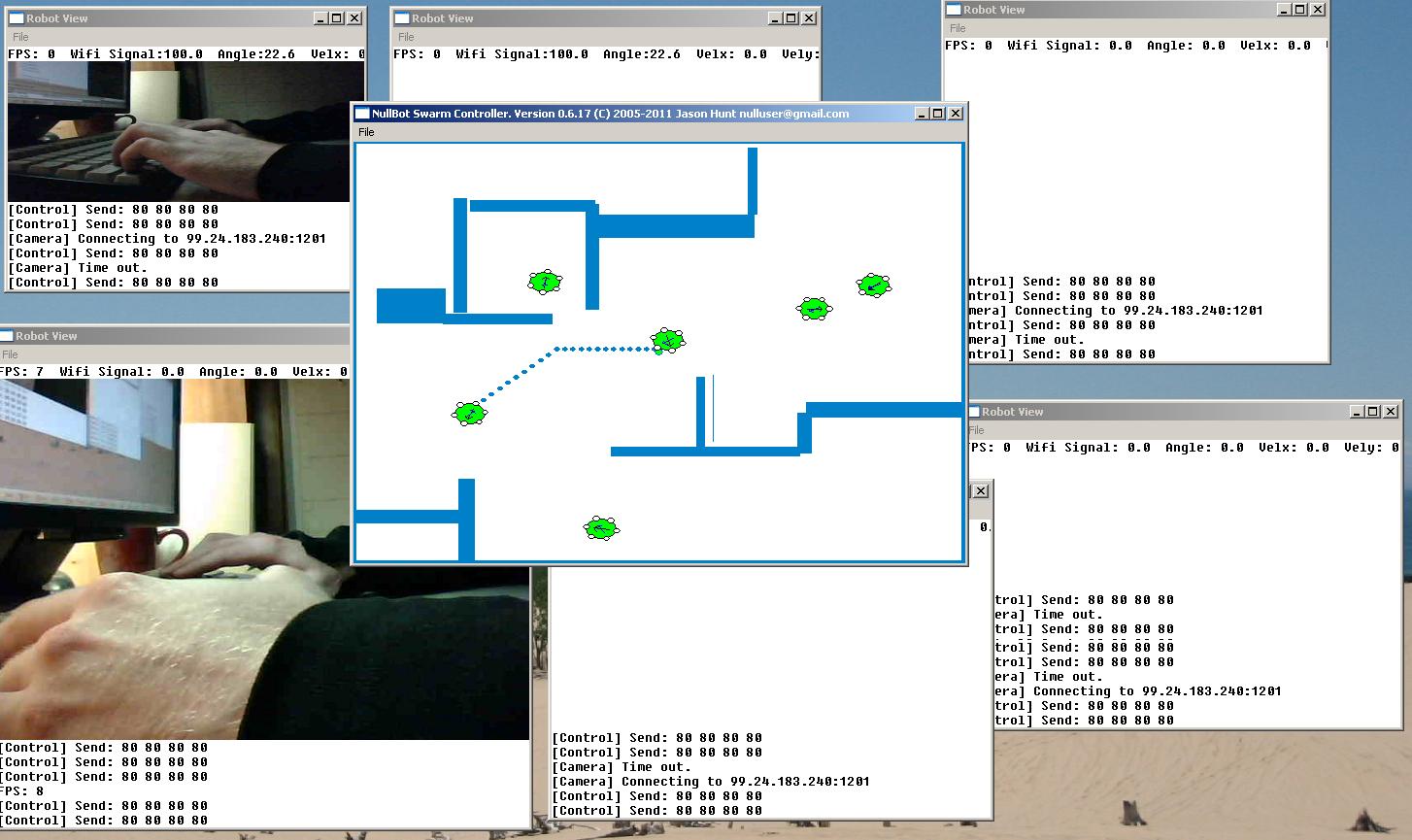
This robot is based on the NullBot Robot Platform. Support IRC: #nullbot on irc.freenode.net This is in active development and I would love to hear your comments and suggestions. Client program is able to control the ZipitBot and stream the camera over a wifi link. Controller board is dsPIC based with an I2C (or serial) interface to the Zipit. No hardware mods required. USB webcam support via USB host mode, powered by a 3.3v to 5v dc-dc converter. The Zipit is running the Z2Sid userland. Wiring to the Zipit Expansion Connector Pin 11: Gnd Pin 13: USB Data - Pin 14: USB Data + Pin 33: I2C Data Pin 34: I2C Clock The Camera is powered by a 3.3v to 5v dc-dc converter from the zipit. Servos are powered by raw battery (7.2v) Controller board is powered by the zipit. Parts Zipit Z2 Servos, Hitech HS-322HD Qty: 4 Wheels, Lego 43.2x28 with servo horn glued to hub Qty: 4 Batteres, 3.6v 800 mAh NIMH from cordless phones Qty: 4 DC-DC Converter: http://www.sparkfun.com/products/8290 Logitech C200 Camera NullBoard based on Microchip dsPIC30f4013 Power switch 28 Gauge Aluminum sheet Double sided tape Dock connector Installing z2sid U-Boot Source Code 0.6.32 - With Swarm Controller First Test Video Live Control over the Internet. POV Control








Contact: nulluser || gmail || com