guest@j.hunt:/# ls
mp3
honda
ant
wifi
orpp
chevette
turret
motion
exdos
bot
code
dvd
mac
firebird
plane
truck
sonarbot
camlab
shop
lab
mig
scanner
tank
yamaha
seca
mapbot
ncp-003
ncp-005
DOM
tl1000s
yoctos
armboard
trip2007
trip2008
trip2009
steam
ebike
microbot
zipitbot
router
hhills
mccct
dubai
ecar
hberg
hhills2
speed
octobot
roboscope
xbot
dockbot
3dprint
dyno
tank2
quad
rover
mazebot
guest@j.hunt:/#./sonarbot
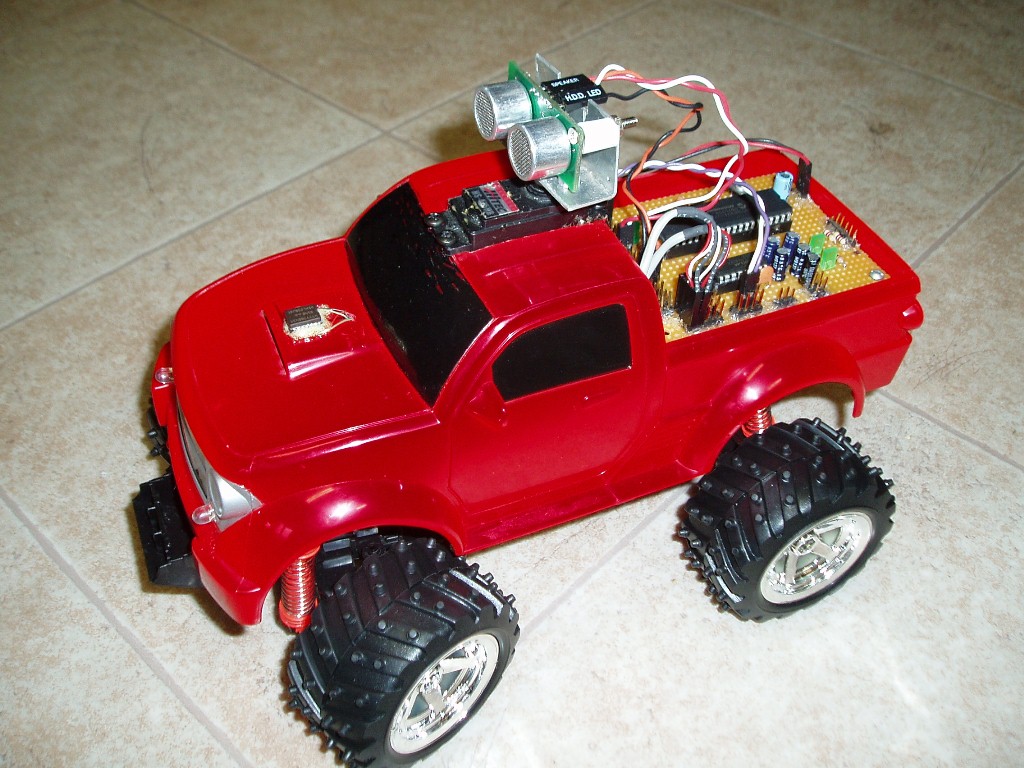
Autonomous Terrain Exploration Robotic System.
ORPP Motion controller source code for project Video of robot moving around This is a demonstration project for the ORPP Motion Controller system. In this case, the board in running in independent mode, no connection to a PC is needed. The robot moves forward until an obstacle is detected. It then tries to determine the best route around it. Future plans: The robot already has a dual axis accelerometer on board. Once the velocity integrals are worked out, I can can the robot make an internal map of the room. This can be used to avoid obstacles in the future, and will be uploaded to a PC for viewing and printing.




Contact: nulluser || gmail || com