guest@j.hunt:/# ls
mp3
honda
ant
wifi
orpp
chevette
turret
motion
exdos
bot
code
dvd
mac
firebird
plane
truck
sonarbot
camlab
shop
lab
mig
scanner
tank
yamaha
seca
mapbot
ncp-003
ncp-005
DOM
tl1000s
yoctos
armboard
trip2007
trip2008
trip2009
steam
ebike
microbot
zipitbot
router
hhills
mccct
dubai
ecar
hberg
hhills2
speed
octobot
roboscope
xbot
dockbot
3dprint
dyno
tank2
quad
rover
mazebot
guest@j.hunt:/#./scanner
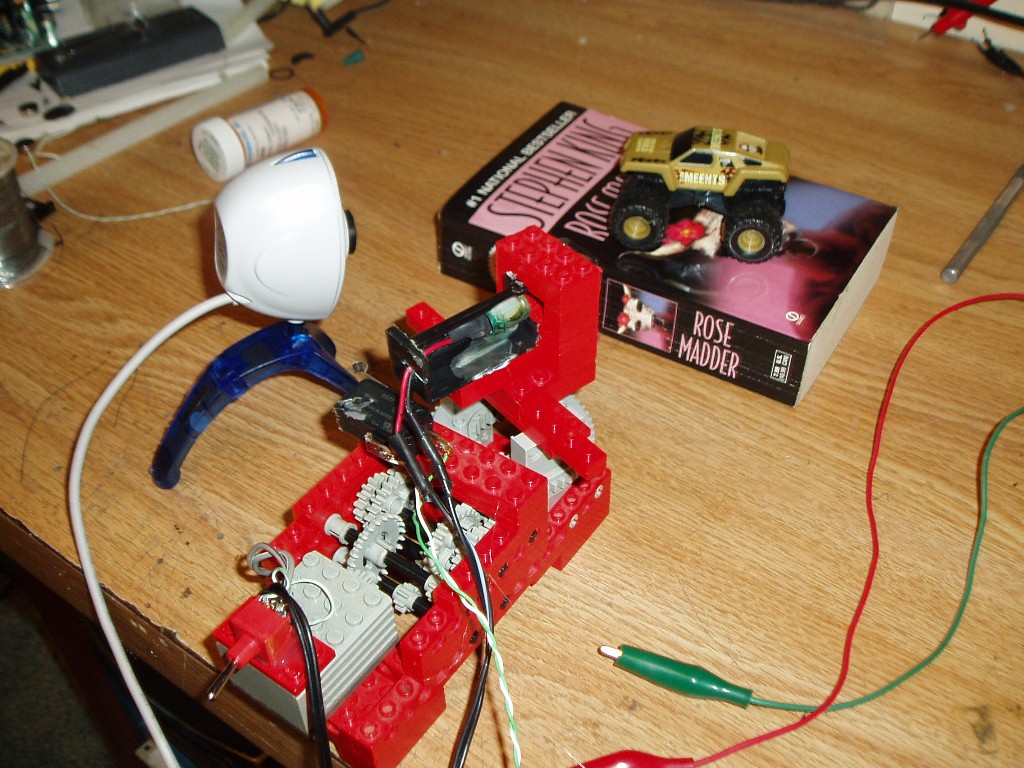
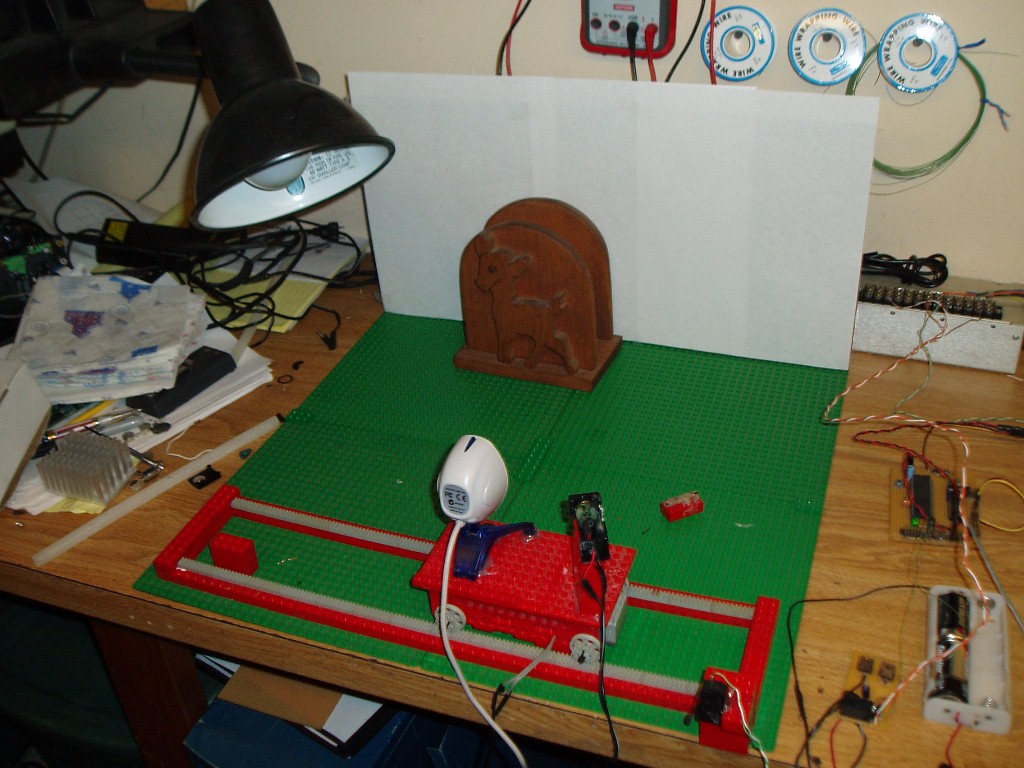
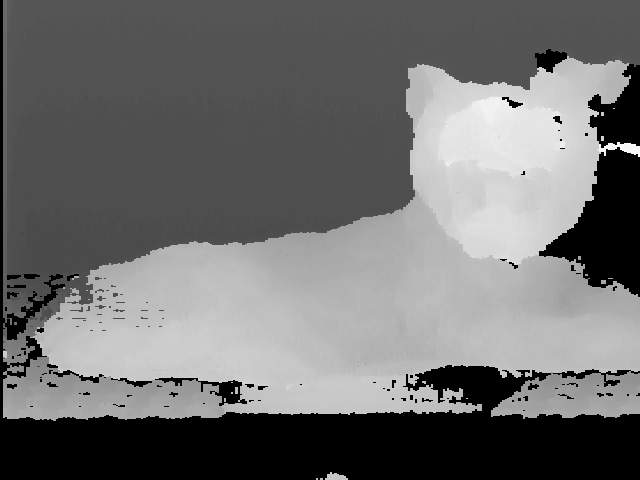
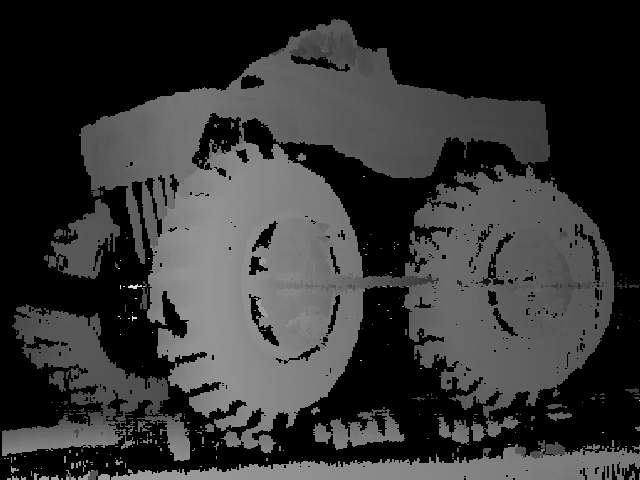
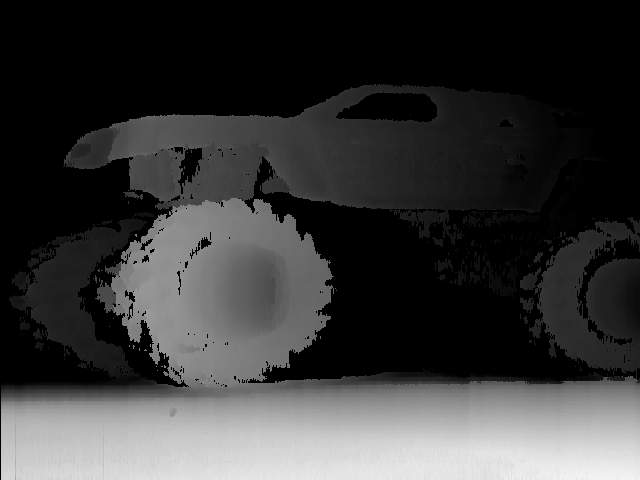
3d Linear Laser Scanner
This project uses a webcam and a line laser to triangulate depth information. The idea is that if the laser and the camera are at an angle, the closer an object is, the more shifted the laser line will be. From that you can calculate depth. It scans the object by calculating the depth of a vertical slice, and rotates the laser to the next position, and repeats. The eventual goal is to create a depth map in front of a robot in realtime. Source code



Contact: nulluser || gmail || com